小型高灵敏度GPS速度仪
LC-8300
LC-8300小型高灵敏度速度仪是利用GPS/GLONASS的卫星信号,测量汽车,摩托车,工程车辆的行驶时,行驶速度,行驶距离的高性能,高精度的速度测量仪器。
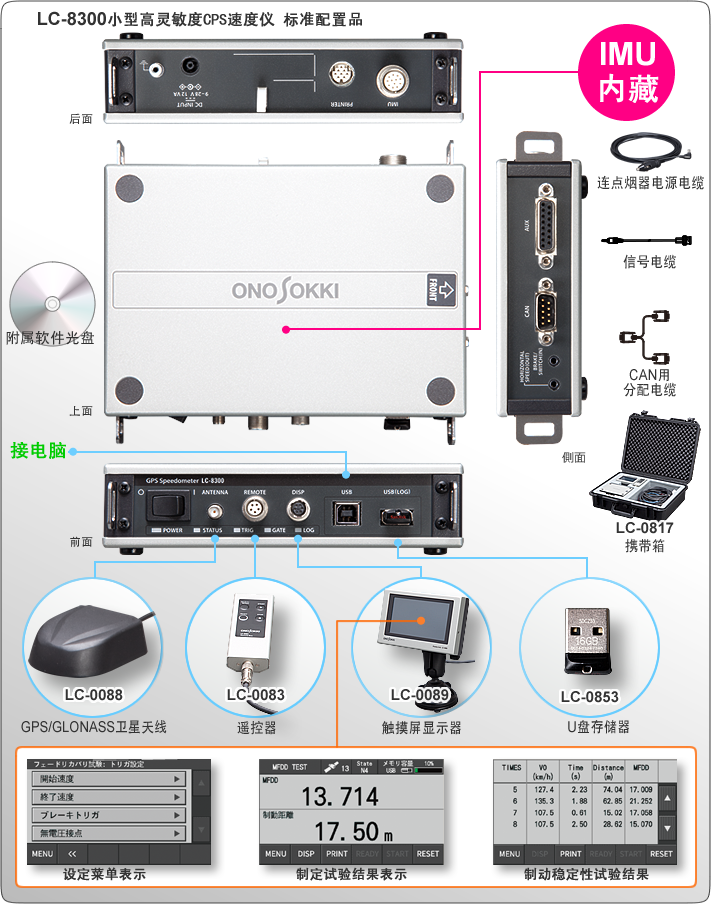
LC-8300比较LC-8100A,LC-8200A(以下,原机型)提高了接受卫星信号的灵敏度,并且可接受GPS与GLONASS两种卫星系统的信号。体积小170×120×41(mm),重量轻约0.75 kg,原机型不便测量的2轮摩托车,工程车辆,微型车辆等,也可以方便地安置。通过使用配套附属的U盘存储器,本机可将测量数据保存到U盘存储器,在不使用电脑的状态下也能测量使用。
在测量精度方面,继承了原机型采用的卫星信号与惯性测量单元(IMU)测量信号的补偿处理的车速测量方式,测量精度高,速度测量精度为±0.2 km/h,距离测量精度为±0.2 %。
在功能方面,标准配置4通道模拟信号输入,1通道脉冲输入,64通道CAN数据输入,可满足各种测量需要。同时采用触摸式液晶显示器,操作性,视认性,表示性能都有大幅提升。
产品在各个方面充分满足对应了客户的需求。
特长
高灵敏度:GPS信号接收灵敏度高,GLONASS信号也可高灵敏度接收,卫星天线可设置在车厢内进行测量。
小型紧凑:内置IMU的本机重量约0.75 kg,使用本机,表示器,卫星天线共3部分即可使用测量。
脱电脑:通过配套的U盘存储器即可测量记录数据
操作性能提高:采用触摸式显示器操作简单方便
高精度:速度±0.2 km/h以内,距离±0.2 %以内的高精度
高性能:标准配置4通道模拟信号输入,1通道脉冲输入,64通道CAN数据输入,可满足各种测量需要
速度的模拟信号输出 / 距离的脉冲信号输出(可选择)
配有携带箱便于仪器保管与携带运送
可使用打印机输出测量数据结果
测量数据更新周期10 ms
通过LED表示本机状态
捕捉卫星信号数不足时报警通知
可以导入外部触发功能
4通道模拟信号输入±20 V,1通道脉冲输入
采用触摸式显示器可直接在显示器上进行操作
可以使用CAN进行数据输入输出
可使用CAN或脉冲数据对速度数据进行补偿处理
可使用LC-8000系列的各种软件
可测量3轴加速度,3轴角速度
数据文件可以用CSV格式输出保存
■ 高精度数据测量 – 使用GPS进行速度测量的原理
当声波、电波或者是光波等的发生源与观测者之间存在速度差异时,被观测到的波的频率会有不同,发生源接近观测者时,被观测到的波的频率变高,反之,发生源远离观测者时,被观测到的波的频率变低。这种现象称为多普勒效应。并可以用以下公式表示。
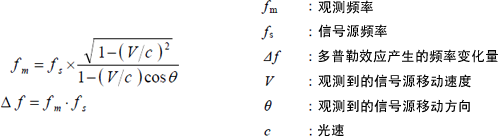
GPS卫星系统的载波信号的频率管理非常精密严格,可以利用多普勒效应测量速度V。但是,GPS卫星的移动速度非常高,并且地球本身也有自转的影响,通过1个GPS卫星的载波信号频率,不可能测出对地的速度值。如下图所示,通过对复数个(4个以上)GPS卫星的载波信号频率进行测量,可测到速度以及位置值,由此可以得到移动物体的高精度速度测量数据。
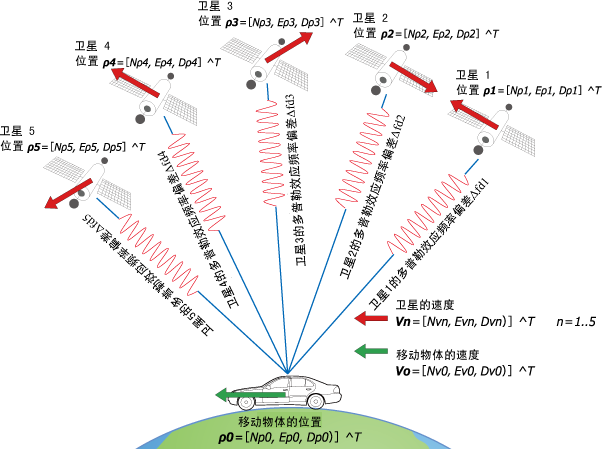
使用此种方法,可以不受电离层的影响,与由位置的变化量计算出速度的方法相比较,可以非常高的精度测量计算出移动物体的移动速度。其水平成分的精度为2 σ时,0.03 m/s,3 σ时,0.08 m/ s。由于卫星系统的原理,垂直成分的精度比较水平成分要差3倍。通过上图,可以看出移动物体接受到复数个卫星的不同频率偏移的载波信号。
可导出下式:
Δ fd1 = 1/ λ(V0?u1 - V1?u1)+ fb
Δ fd2 = 1/ λ(V0?u2 - V2?u2)+ fb
Δ fd3 = 1/ λ(V0?u3 - V3?u3)+ fb
Δ fd4 = 1/ λ(V0?u4 - V4?u4)+ fb
Δ fd5 = 1/ λ(V0?u5 - V5?u5)+ fb
这里,λ为卫星载波信号频率的波长约0.19 m,fb为接收信号的频率偏差(Hz),un(n = 1..5)为卫星与信号接收器在视线方向上的单位矢量,单位矢量可由下式算出。
un =ρ n/| ρ n|(n = 1..5)
ρ n =[(Npn - Np0),( Epn - Ep0),( Dpn - Dp0)]^T(n = 1..5)
通过,以上计算方程,解出Vo。即可得到移动物体的速度。
■ 稳定测量 - 使用IMU惯性测量单元补偿处理
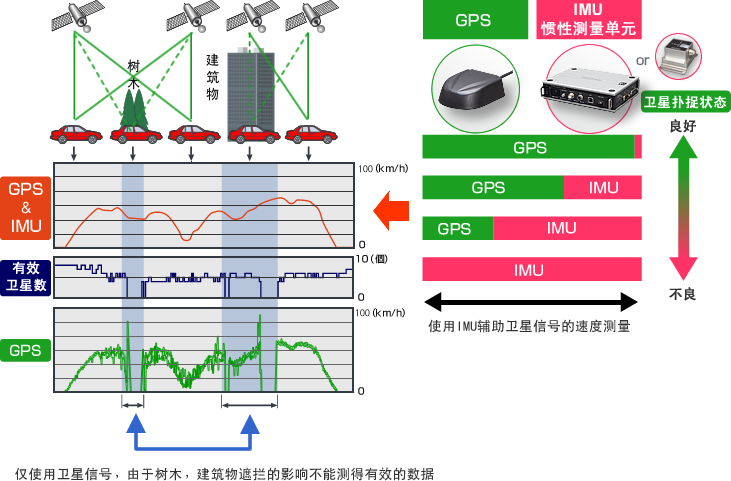
由于一般道路两侧存在的树木,建筑物等影响,如下图所示,多普勒方式的速度测量值会包含大量的干扰成分,另外,通过像过街天桥,高架桥下等妨害卫星信号的接收的地段时,仅利用GPS等卫星信号单独进行速度测量是不可能的。
如果将卫星信号测量的速度数据与IMU的3轴加速度传感器/3轴陀螺仪计算的速度之间的比例算出进行补偿,在存在干扰的状态下,如下图所示,必较单独使用卫星信号时,可以得到非常平缓的高精度速度测量数据。
另外,在通过像过街天桥,高架桥下等妨害卫星信号的接收的地段时,如果使用IMU惯性测量单元进行速度的补偿处理,在较短时间内即使接收不到卫星信号的情况下,也可以测量到高精度连续的速度数据。
系统构成

本机与电脑软件对应测量试验对照表
| LC-8300小型高灵敏度GPS速度仪 | ||||
| 本机对应测量试验(不用电脑) | 电脑软件对应测量试验 | |||
| zui小构成:本机,卫星天线,表示器,遥控器 测量数据保存:本机或U盘 | zui小构成:本机,卫星天线,电脑 测量数据保存:电脑内存储器 | |||
| 起动加速 | LC-0827 本机加速试验功能 | 起动加速 | LC-0831 加减速试验软件 | |
| 行驶加速 | 行驶加速 | |||
| MFDD | LC-0828 本机制动试验功能 | MFDD | ||
| ABS | ABS | |||
| 制动稳定性 | - | |||
| 惰行 | LC-0829 本机滑行试验功能 | 滑行 | ||
| 定地燃料消费 | LC-0832 燃料消费试验软件 | |||
| 模式燃料消费 | ||||
※:以上试验功能及试验软件均为选配件。
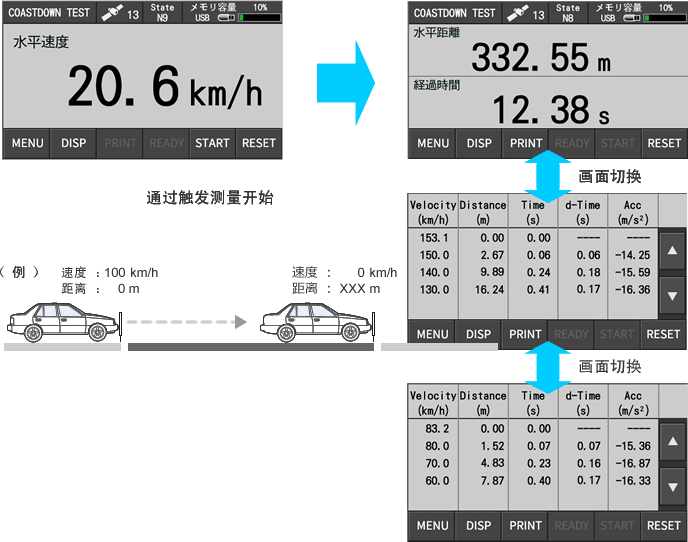
6. 滑行试验
测量车辆在高于规定速度的车速状态下,由规定速度起滑行至车辆停止时的所用时间,移动距离,行驶速度。
由各测量数据计算出CD数据值并对车辆行驶途中经过数据进行确认。
规格
| 测量精度 | 水平速度 | 测量范围/精度 | 0.1 ~ 500.0 km/h/±0.2 km/h以内 (水平速度30 km/h以上,扑捉卫星信号7个以上时) |
| 水平距离 | 精度 | ±0.2 % (直行距离300 m,水平速度30 km/h以上,扑捉卫星信号7个以上时) | |
| 标准测量项目 | 水平速度(km/h),水平距离(m),时间(s),UTC时刻,卫星数,HDOP(水平精度低下率),行进方位( °),北方向速度(km/h),东方向速度(km/h),北方向距离(m),东方向距离(m),行进距离(m),纬度(dms),经度(dms),标高(m)。 | ||
| 选配测量项目 | 横距离(m),垂直速度(km/h),垂直距离(m),VDOP(垂直精度低下率),侧移量(m),偏航角( °),螺旋角( °),横摇角( °),XYZ加速度(m/s2),XYZ角速度( °/ s),坡度(%)。 | ||
| 更新(输出)频率 | 100 Hz | ||
| 一般规格 | 本机 | 使用电源/消耗功率 | DC 9 ~ 28 V (非独立绝缘),AC 100~ 240 V(选配 AC交流适配器)/ zui大12 VA (DC电源输入,使用外部设备时) |
| 使用/保存温度 | 0 ~ 50 ℃ / -10 ~ 60 ℃ (湿度20~80 %RH,不结露) | ||
| 外形尺寸/重量 | 约170×120×40 mm(不含突起部分) 约0.75 kg | ||
| 显示器 | 外形尺寸/重量 | 约150×100×100 mm(不含突起部分) 约0.5 kg | |
| 遥控器 | 外形尺寸/重量 | 约120×50×20 mm(不含突起部分) 约0.08 kg | |
| 卫星天线 | 外形尺寸/重量 | 约66×50×22 mm(卫星天线部分) 约0.1 kg | |
| 防护等级 | IP67 | ||
| 输出 | 速度模拟信号输出 | 电压范围 | 0~10 V (SI单位:0~10 V/0~500.0 km/h,mile单位:0~10 V/0~250.0 mile/h) |
| 负载阻抗 | 10 kΩ 以上 | ||
| 距离脉冲信号输出 | 分辨率 | SI单位时:10, 5, 1 mm/pulse中选择 mile单位时:16.0934, 8.0467, 1.6093 mm/pulse中选择 | |
| 输出延迟 | 10 ms 以内 | ||
| 输出信号 | 矩形波脉冲 Hi 5 V±0.5 V ,Lo 0.5 V以下 | ||
| DUTY | 50 % ±10 % | ||
| 负载阻抗 | 10 kΩ 以上 | ||
| 备注 | 通过本机侧面HORIZONTAL SPEED接口设定选择模拟电压或脉冲输出 | ||
| 输入 | 模拟信号输入 | 通道数 | 4 |
| A/D转换器位数 | 16 | ||
| 电压范围 | ±20 V | ||
| 截止频率 | 50 Hz | ||
| 其他 | 通过外部电压信号的触发功能。 通道1为测量开始触发。 通道2为测量停止触发。 | ||
| 脉冲输入 | 通道数 | 1 | |
| 输入耦合 | AC或DC | ||
| 功能 | 脉冲计数/频率/ DUTY | ||
| 输入波形 | AC时正弦波,DC时矩形波 | ||
| 备注 | 通过本机侧面AUX接口,使用选配信号电缆输入 | ||
| CAN | 共通 | 波特率 | 125 kbps,250 kbps,500 kbps,1000 kbps |
| 标准 | 支持Ver.2.0 B | ||
| 输入 | 输入接口 | 2(接口A,接口B) | |
| 数据 | 32通道输入/1接口(zui大64通道) | ||
| 其他 | 接口B侧,可选择设定为CAN的输入 | ||
| 输出※1 | 输出更新周期 | OFF/1 Hz/2 Hz/5 Hz/10 Hz/20 Hz/100 Hz | |
| 标准输出项目 | 水平速度(km/h),速度单位,水平距离(m),UTC时刻,卫星数,HDOP(水平精度低下率),行进方位( °),纬度(dms),经度(dms),标高(m),开始 / 停止 / 清触发,阈门状态,内部状态,精度状态。 | ||
| 选配输出项目 | 垂直速度(km/h),垂直距离(m),VDOP(垂直精度低下率),侧移量(m),偏航角( °),螺旋角( °),横摇角( °),XYZ加速度(m/s2),XYZ角速度( °/ s),坡度(%)。 | ||
| 其他 | CAN输出功能有效时,B接口不能用于CAN信号输入。 | ||
| 备注 | 通过本机侧面AUX接口,使用选配信号电缆输入 | ||
| 其他功能 | 蜂鸣器,外部信号触发,通用传感器用DC12 V输出,设定条件存储器,使用选配打印机输出数据,传送保存数据。 | ||
| 试验功能 | 本机对应标准试验功能 | 普通测量,区间测量 | |
| 本机对应选配试验功能 | 起动加速试验,行驶加速试验, 制动试验(MFDD),制动试验(ABS), 制动试验(制动稳定性),滑行试验。 | ||
| 电脑对应标准试验功能※2 | 基本功能(本机的条件设定,电脑上测量结果状态表示,传送数据至OS-2000系列时间序列数据分析软件) | ||
| 电脑对应选配试验功能※2 | 加减速试验软件,燃料消费试验软件, 行驶轨迹表示软件。 | ||
| 附属品 | 触摸式显示器(带信号电缆3.0 m)×1 遥控器(带信号电缆2.0 m)×1 GPS/GLONASS卫星天线×1 连点烟器电源电缆(3.0 m)×1 信号电缆(插头 ? BNC 2.0 m)×2 连接电脑用USB信号电缆(1.5 m)×1 CAN用分配电缆(0.35 m)×1 U盘存储器×1 附属软件光盘×1 使用说明书×1 携带箱×1 显示器用设置用具×1 显示器设置用底板×1 | ||
| 选配件 | <本机> 电源电缆(接电瓶用)【LC-0082】 km/mile单位切换功能【LC-0824】 IMU数据输出功能(带有小型IMU【LC-0087】)【LC-0825】 本机垂直方向测量功能【LC-0826】 本机加速试验功能【LC-0827】 本机制动试验功能【LC-0828】 本机滑行试验功能【LC-0829】 CAN数据输出功能【LC-0854】 CAN用信号电缆(2.0m)【LC-0861】 CAN-OBD2信号电缆【LC-0863】 带式开关【LC-0864】 数字式打印机【DPU-414】 打印机用交流电源适配器【PW-C0725-W1-U】 打印机用热敏纸【CX-050B】 本机用交流电源适配器【PS-P20018A】 交流电源适配器电源电缆【VM1072-VM1700(日本用),日本以外用】 <电脑> 加减速试验软件【LC-0831】 燃料消费试验软件【LC-0832】 行驶轨迹表示软件【LC-0833】 | ||
*1:选配*2:参照工作环境 |
工作环境
| OS | Windows?XP(sp3) / 7 [32/64 bit] |
| 内存 | 1 GB以上 |
| HDD | 80 GB以上 |
| CPU | In CoreTM2 Duo 2 GHz 以上 |
| 显示器 | 1280 x 1024 以上 |
| USB | USB2.0(high speed) 1接口以上 |
| 光盘驱动器 | 对应DVD-R,CD-R光盘,用于软件安装与版本升级 |
*Windows? XP, Windows Vista?, Windows? 7 是微软公司在美国和/或其他国家或地区的商标或注册商标。 |
其他选配件
| LC-0864 带式开关 | DPU-414 数字式打印机 | LC-0866 通用输入输出信号电缆 |
 |  |  |
